Mikroskopijne roboty wykonane z własnych komórek pacjenta mogą być w stanie pracować wewnątrz organizmu, aby naprawić uszkodzenia, zidentyfikować oznaki choroby lub zwalczać infekcje.
Jako architekt Gizem Gomoskaya zawsze był zafascynowany samoorganizacją. Projektując miasto, budynki buduje się zgodnie z planem, ale wzorce, w jakie nieuchronnie wpadają obywatele – dokąd podróżują, jak się spotykają, co robią – wyłaniają się same.
Podczas zdobywania tytułu magistra architektury na MIT natknęła się na dziedzinę biologii syntetycznej, gdzie znalazła naukowców, którzy „budowali cegły z żywych komórek, wykorzystując jedynie to, co ma do zaoferowania natura”.
Teraz doktorat. Gomoskaya, kandydatka na wydział biologii na Uniwersytecie Tufts i w Instytucie Inżynierii Inspirowanej Biologicznie Wyss, wykorzystuje swój instynkt architektoniczny do budowania robotów z żywych komórek.
W badanie Opublikowane w Zaawansowana naukaJej zespół, kierowany przez biologa rozwojowego Michaela Levine'a z Tufts University, przekształcił komórki ludzkich płuc w żywe, samobieżne roboty. Te biologiczne maszyny, zwane robotami, łączą się, aby pomóc rozdartej tkance zagoić się.
W przyszłości mikroskopijne roboty wykonane z własnych komórek pacjenta będą mogły pracować wewnątrz organizmu, naprawiając uszkodzenia, identyfikując oznaki choroby lub zwalczając infekcje.
Budowanie biorobotyki
Roboty nie były pierwszą próbą laboratorium w zakresie budowania robotów biologicznych lub biobotów. Prawie cztery lata temu zespół Levina zbudował Xenoboty, kontrolowane wielokomórkowe plamy wykonane z embrionalnych komórek macierzystych żaby. Te plamy były pierwszymi w pełni biologicznymi robotami, które powstały poprzez połączenie komórek w wstępnie zaprojektowane struktury, które mogły poruszać się samodzielnie.
Chociaż bioboty pochodzące od żab są pionierami w laboratorium, mają ograniczony potencjał terapeutyczny u ludzi. Obce komórki prawdopodobnie zostaną odrzucone przez ludzki układ odpornościowy, ale komórki ludzkie (szczególnie komórki ludzkie) są bardziej mile widziane. Dlatego Gomoskaya zdecydowała się zbudować humanoidalne roboty z komórek normalnie wyściełających ludzką tchawicę.
Komórki te mają tę zaletę, że są pokryte maleńkimi wachlarzami przypominającymi włosy, zwanymi rzęskami, które pomagają przepychać płyn przez ludzkie drogi oddechowe. Gumoskaya wyraziła nadzieję, że wbudowane rzęski „wykorzystają to, co natura potrafi najlepiej” i dadzą robotom możliwość swobodnego poruszania się.
Ksenoboty były całkowicie biologiczne, ale mimo to powstawały pojedynczo poprzez połączenie projektowania wspomaganego algorytmami, wirtualnej symulacji i żmudnej konstrukcji dłoni. Zamiast projektować każdego robota indywidualnie, zespół badawczy Gomoskayi chciał, aby robot zbudował się sam.
Aby to zrobić, Gomoskaya zaczęła od hodowli tysięcy pojedynczych komórek przez dwa tygodnie w specjalnej matrycy 3D, gdzie rozmnażały się i łączyły w maleńkie kuliste organizmy. Kiedy już dojrzeją (ale nadal będą nieruchome), wyodrębnisz sferoidy z matrycy. „To tutaj rozpoczynają swoją podróż” – powiedziała.
Następnie przemyto je specjalnym płynem, aby wydobyć ich rzęski. Kiedy dojrzałe roboty, każdy składający się z około 100 do 1000 komórek, zostały pokryte rzęskami i gotowe do mobilizacji, Gomosskaya przeanalizowała, w jaki sposób kształt każdego robota determinuje jego styl poruszania się.
Powstałe roboty w naturalny sposób podlegają różnym tropom „osobowości” – powiedział Gomoskaya. Niektóre są małe, okrągłe i pokryte równą warstwą rzęsek. Inne były większe, kręte i miały sporadycznie rozmieszczone frędzle.
Te wyraźne kształty nadawały różnym typom robotów własny charakter ruchu, niektóre pływały po linii prostej lub po okręgu, inne głównie kołysały się w miejscu. Silny związek, jaki zaobserwowali badacze między kształtem robota a jego zachowaniem, zadecyduje o przyszłych wyborach projektowych, być może dając im możliwość tworzenia robotów o określonych, kontrolowanych zachowaniach.
Zapełnianie szczelin pomiędzy komórkami nerwowymi
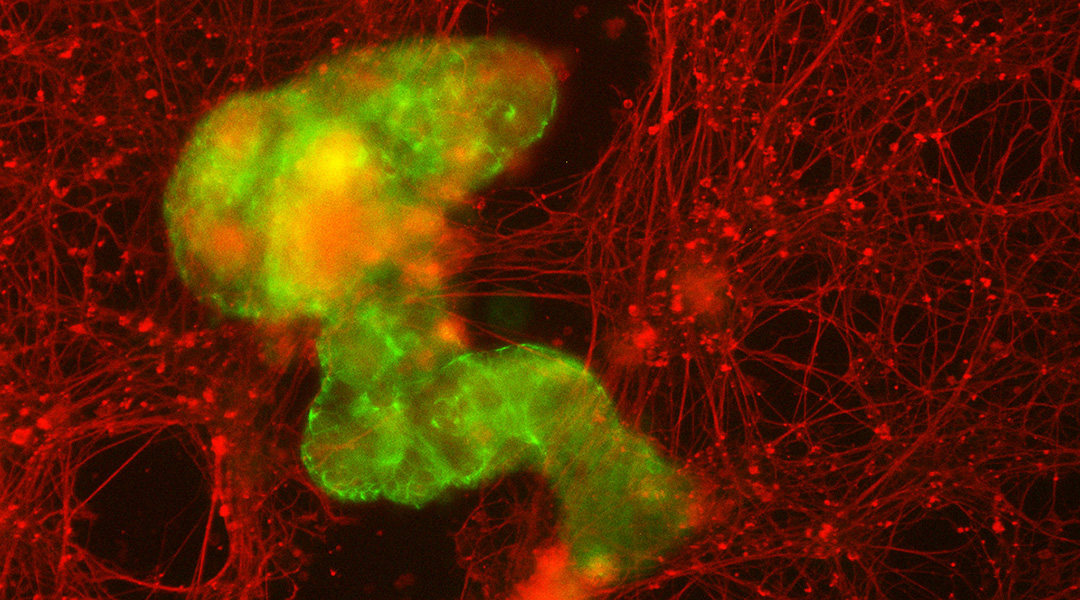
Jedną z potencjalnych ról robotów w prawdziwym świecie mogłoby być pełnienie roli mikrochirurgów naprawiających uszkodzone tkanki wewnątrz ciała. Aby przetestować tę zdolność, Gomoskaya użył standardowego modelu uszkodzenia tkanki: szalki Petriego zawierającej ludzkie neurony, wydrapanej pośrodku.
Po umieszczeniu w tym środowisku i umożliwieniu swobodnego poruszania się roboty przekroczyły punkt zerowy. Co ciekawe, roboty połączyły się, tworząc „superboty”, które uszczelniają rozdarte boki uszkodzonej tkanki, umożliwiając odrastanie neuronów pod spodem.
Gomosskaya stwierdziła, że zdolność robotów do łączenia się w większe grupy ma kluczowe znaczenie dla ich potencjalnej roli w leczeniu tkanek ludzkich. „Kiedy umieścisz te większe struktury w pęknięciach neuronalnych, grupa dokona czegoś, czego nie będzie w stanie osiągnąć jednostka”.
Podczas gdy mały robot może samodzielnie prześlizgnąć się przez zadrapanie w tkance, większy superrobot może wypełnić lukę, umożliwiając ponowne uszczelnienie uszkodzonej tkanki.
W przyszłości zespół ma nadzieję przetestować roboty w bardziej realistycznych ustawieniach, aby zobaczyć, jak radzą sobie z naprawą bardziej złożonych obrażeń wykraczających poza pojedyncze zadrapanie, a także dowiedzieć się, które zachowania robotów są najbardziej przydatne w wykonywaniu pracy. Pewnego dnia roboty te mogą służyć jako forma medycyny spersonalizowanej, wykorzystując własne komórki pacjenta jako surowiec do indywidualnej naprawy tkanek.
„Jako projektant lub inżynier możesz stworzyć rzeczy, których ewolucja nie miała powodu tworzyć” – powiedziała Gomoskaya. „Po co ograniczać się do tego, co już istnieje?”
Odniesienie: Gomoskaya i in., Samodzielnie skonstruowane żywe bioroboty mobilne z dorosłych ludzkich somatycznych komórek progenitorowych, Nauka zaawansowana (2023). doi: 10.1002/advs.202303575

„Odkrywca. Entuzjasta muzyki. Fan kawy. Specjalista od sieci. Miłośnik zombie.”
More Stories
Czy firmy ubezpieczeniowe powinny dyskryminować ze względu na cechy genetyczne?
Pierwsza na świecie szczepionka przeciwko wirusowi syncytialnemu układu oddechowego dla osób starszych została obecnie zarejestrowana do stosowania w Nowej Zelandii
Eksperci: Nowy wariant wirusa „FLiRT” jest w stanie ominąć układ odpornościowy